























Introducción
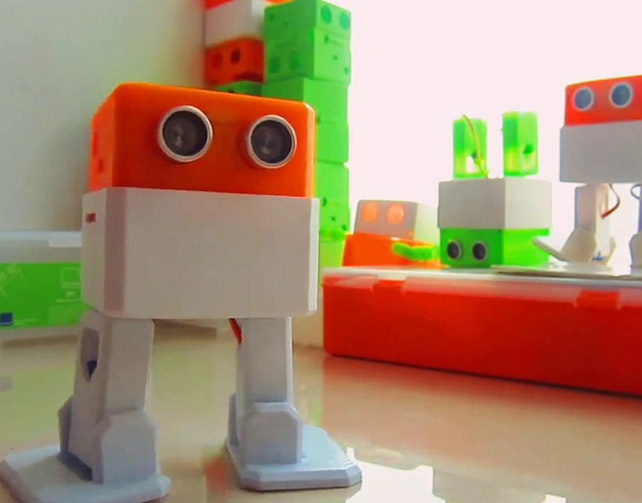
¿Qué es Otto DIY?
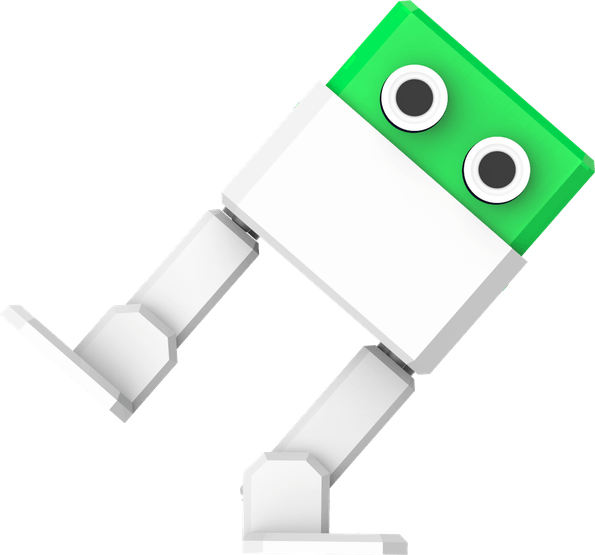
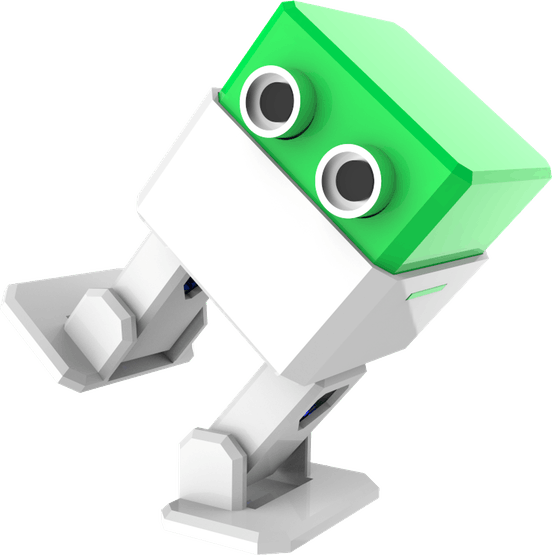
Un robot interactivo que cualquiera puede construir! Muy fácil de imprimir en 3D y montar.
Su estructura fue inspirada en Bob the Biped y su programación se basa en el código de Zowi, que al igual que Otto son robots bípedos de código abierto.
La abreviación DIY vine del inglés Do It Yourself que significa Hágalo Usted Mismo!

¿Qué puede hacer Otto?
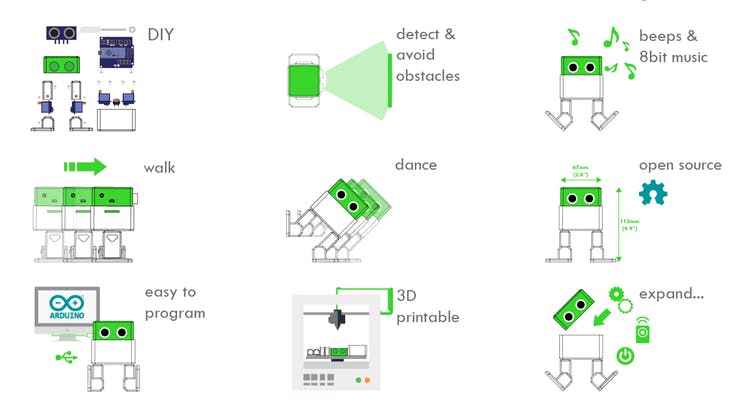
Otto camina, baila, hace sonidos y evita obstáculos.
¿Por qué es especial Otto?
Otto es completamente de código abierto, compatible con Arduino, imprimible en 3D y tiene la misión social de crear un entorno inclusivo para los niños.
El acto de construir y codificar tu propio Otto creará un vínculo emocional entre tú y él que se convertirá en una amistad duradera.
CC-BY-SA
Las diferencias de Otto están en el tamaño de ensamblado (11 cm x 7 cm x 12 cm) y en la integración de componentes y expresiones.
Con nuestro kit, algunas partes impresas en 3D, conexiones electrónicas simples (casi no requiere soldadura), y habilidades básicas de codificación, usted podrá construir su propio Otto en tan solo una hora o incluso menos.
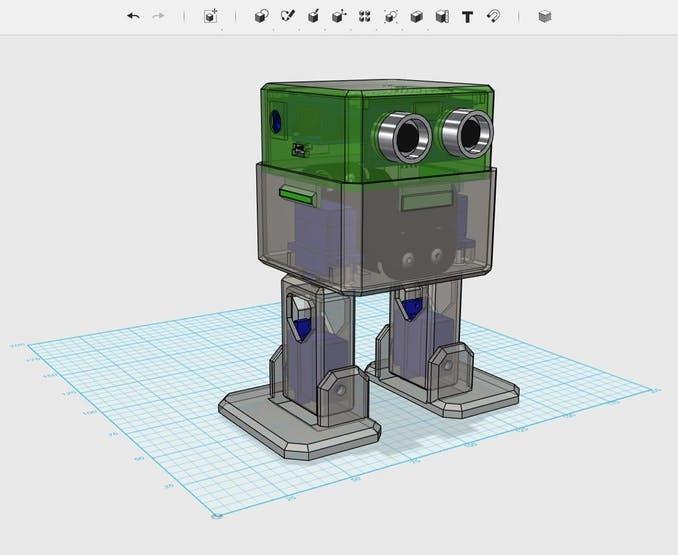
Otto fue diseñado con Autodesk 123D Design, por lo tanto utilizando el software TinkerCAD usted puede modificarlo, personalizarlo o realizar otras mejoras.
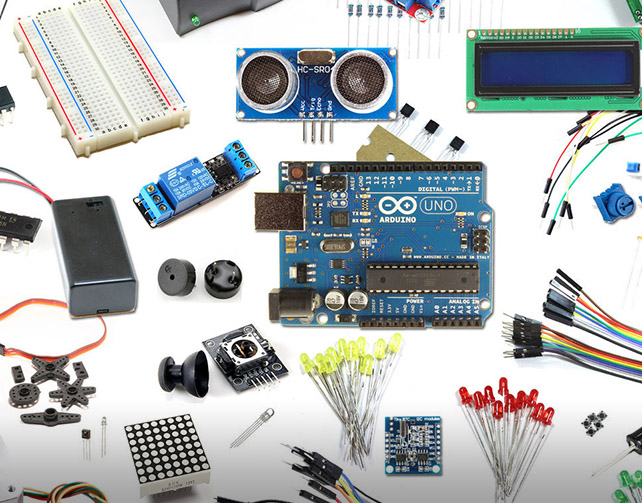
Lista de Materiales
Componentes de Hardware
- Arduino Nano R3
- Shield de Arduino Nano I/O para Otto DIY
- Cable USB-A a Mini-USB
- 4x SG90 Motor Micro-servo
- Buzzer
- 6x cables puente hembra/hembra
- 4x sportes para baterias AA
- Pilas AA
- Otto DIY 8x8mm Micro-switch Auto-bloqueo On/Off
Software y aplicaciones on-line.
Herramientas y máquinas de fabricación.
- Impresora 3D (genérica)
- Destornillador de cruz Phillips
* Si no posee o le resulta difícil obtener las piezas, simplemente puede comprar nuestros kits completos.
Impresión 3D
Solo necesita imprimir 6 partes:
- Cabeza
- Cuerpo
- x2 Pierna
- x2 Pie
Ajustes de impresión
Otto está muy bien diseñado para la impresión 3D, los archivos que descargó están propiamente orientados y centrados, por lo que no le causarán problemas si respeta los siguientes parámetros.
- Se recomienda utilizar una impresora 3D FDM con material PLA.
- No necesita soportes ni raft en absoluto.
- Resolución: 0.15mm
- Densidad de relleno: 20%
Después de imprimir, deberá limpiar un poco las áreas de las piernas y los pies que fijan los motores. Para este proceso puede utilizar un Cutter (si la calidad de impresión en 3D es lo suficientemente buena, no es necesario).
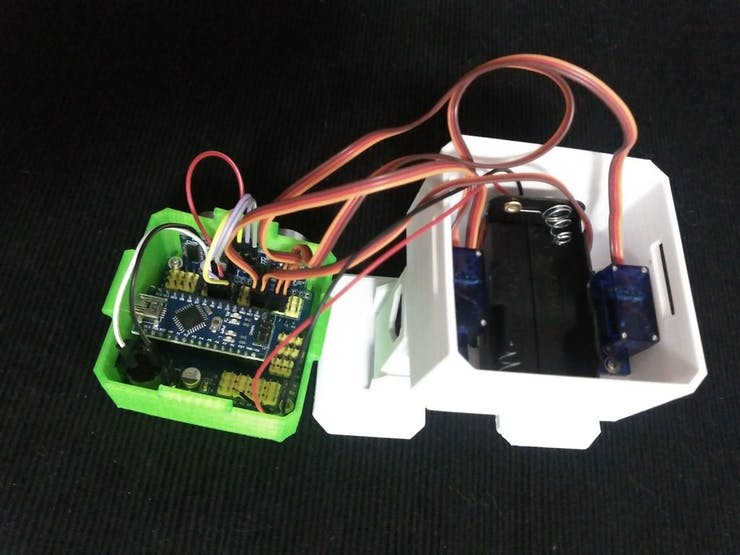
Organización
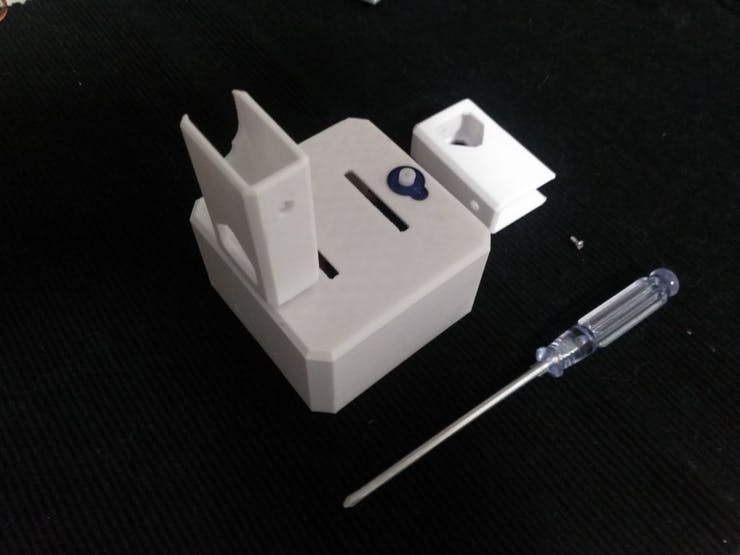
- Reúna todas las piezas de hardware que necesitará para este ensamblaje, reorganícelas de abajo hacia arriba.
- Los Motores Micro-servo vienen con 3 tornillos, los cuales se pueden apreciar en la imagen junto con cada parte enumerada.
- Un Mini-protoboard es una alternativa para el shield pero requiere más cableado y tiempo.
- Recuerde tener magnetizado su destornillador.
- Tenga a mano un soldador (a batería o alimentado por USB).

Ensamblaje
1. Fije los Micro-servos a los Pies
- Coloque un Micro-servo dentro del pie y luego empújelo hacia adentro, si es demasiado difícil, tal vez necesite limpiar más el área con el cutter.
- Es muy importante verificar que el servo pueda girar al menos 90 grados a cada lado.
- Después de verificar el movimiento, use solo el tornillo pequeño para fijarlo.
- Mismo proceso para el otro pie.
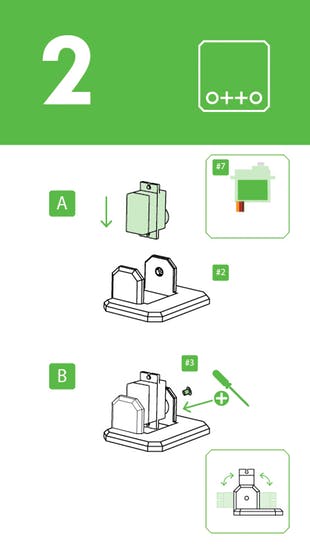

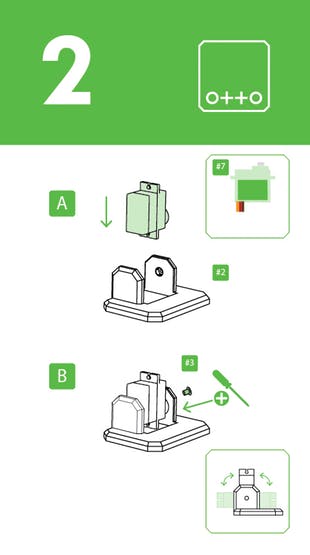
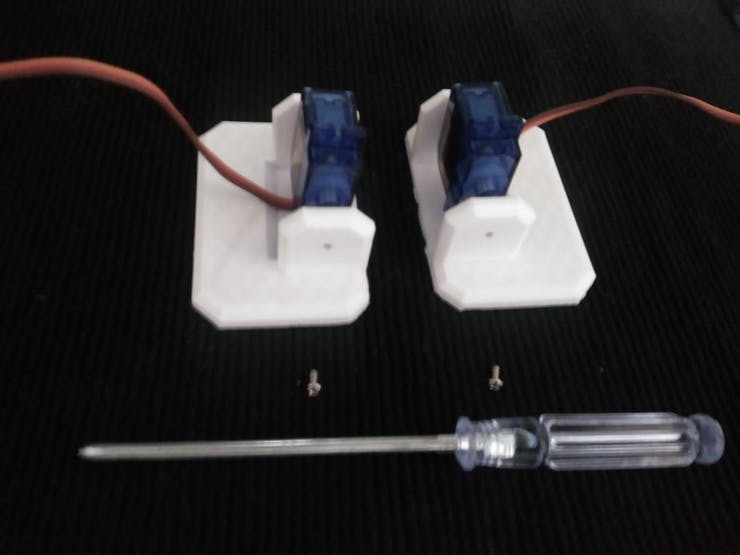
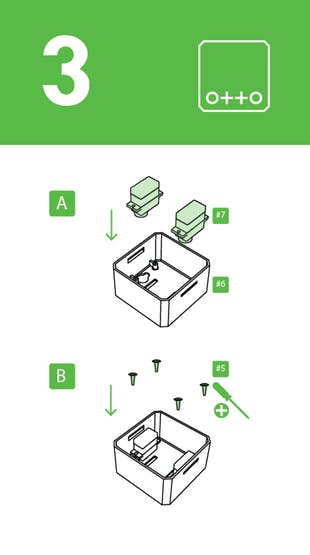
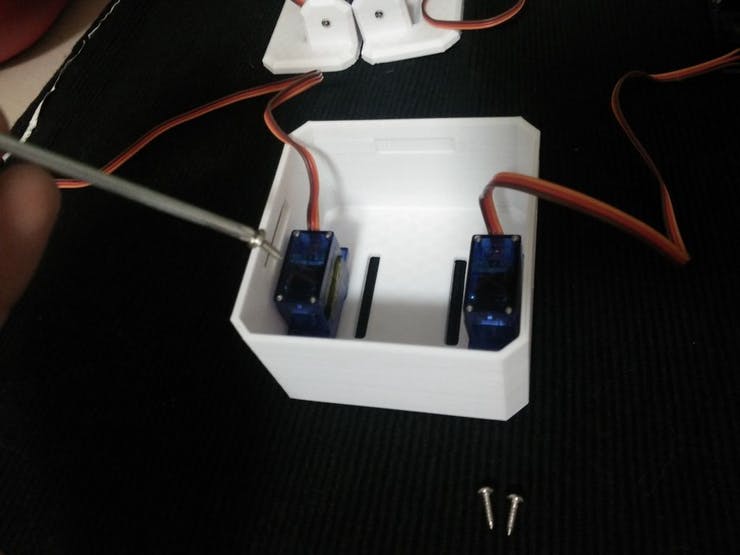
2. Fije los Micro-servos al Cuerpo
- Tome los otros 2 Micro-servos y colóquelos en los lugares definidos en el cuerpo impreso en 3D.
- Fíjelos solo con los tornillos.
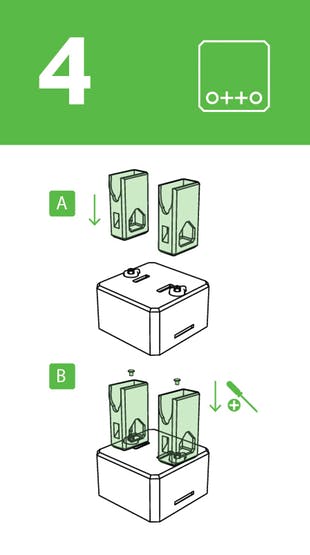
3. Fije las Piernas al Cuerpo
- Conecte las piernas al centro del Micro-servo.
- Es importante, al igual que los Micro-servos del pie, comprobar que las piernas puedan girar 90 grados a cada lado con respecto al cuerpo.
- Después de verificar la alineación, fíjelos usando los tornillos pequeños en el orificio dentro de la pierna.
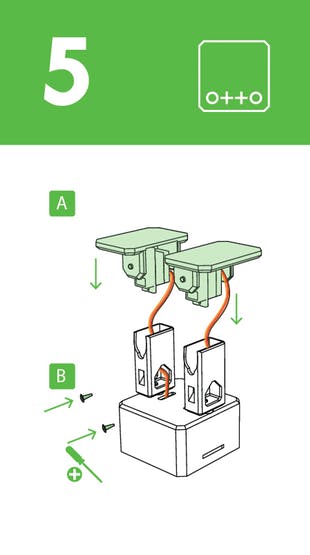
3. Fije los Pies a las Piernas
- Cuidando los cables como se muestra en la ilustración, debe colocarlos dentro de las ranuras del cuerpo que pasan por el orificio de las patas.
- Una vez que estén en la posición correcta, use los tornillos para fijarlos desde la parte posterior.

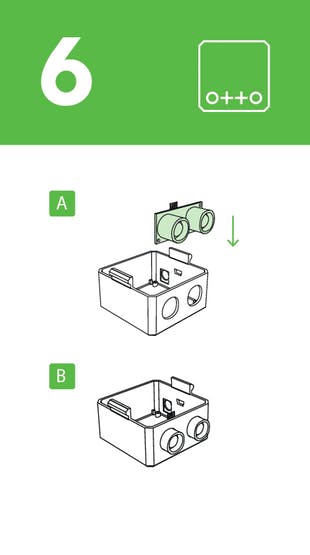
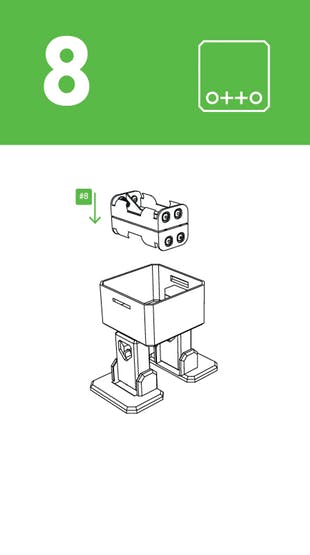
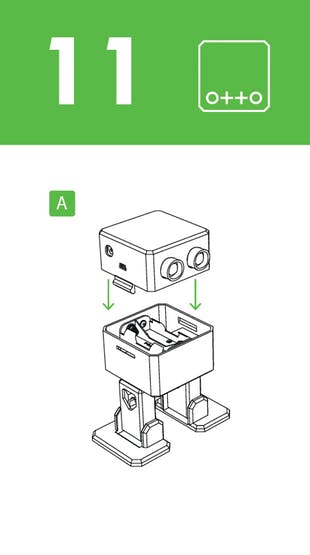
4. Fije la cabeza al cuerpo
- Comience desde el sensor de ultrasonido. Es importante empujar los ojos lo mas posible.
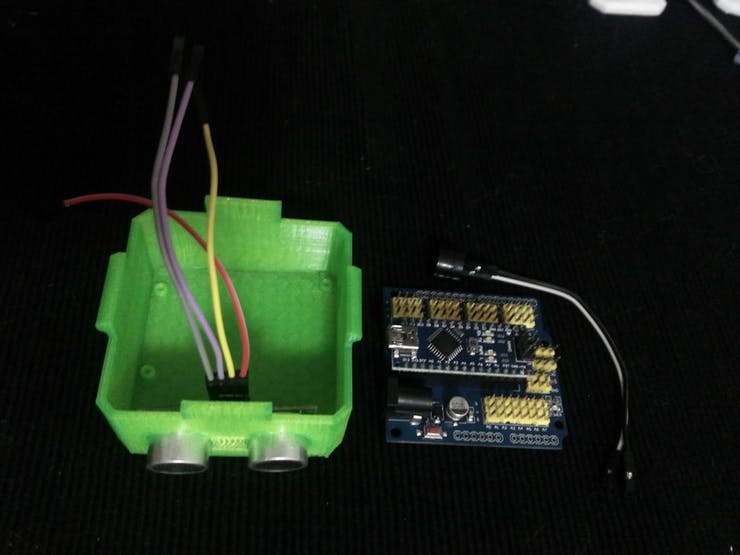
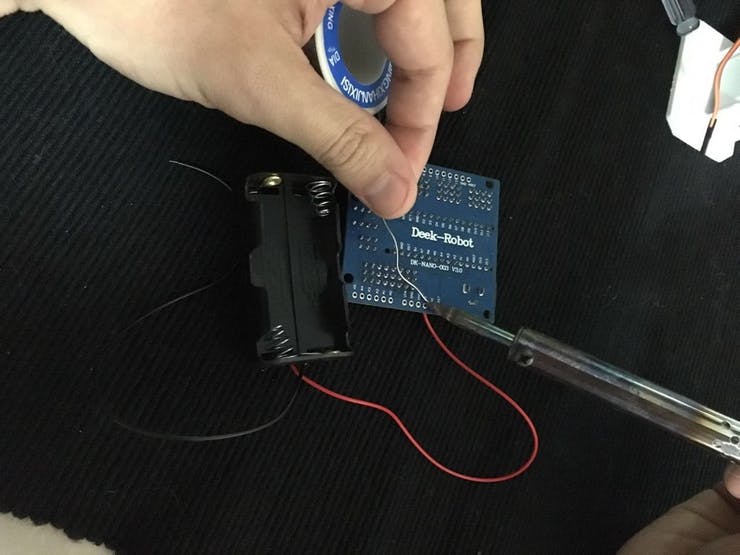
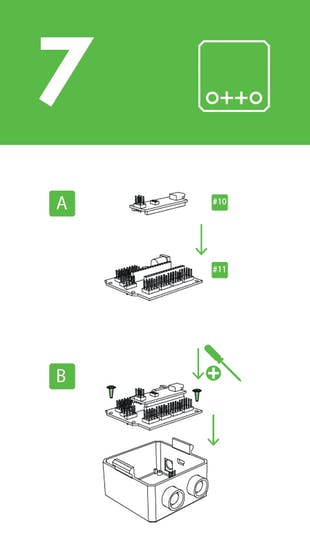
- Después de colocar el Arduino Nano en el shield, opcionalmente puede soldar el cable positivo del soporte de baterías al conector Vin y el negativo a cualquier GND.
- Inserte diagonalmente las dos tarjetas montadas, enfrentando el conector USB al orificio en el cabezal impreso en 3D, luego use los últimos 2 tornillos para fijarlo.

Si lo desea puede descargar el Manual de Instrucciones (en inglés) para una descripción mas detallada.
Manual de InstruccionesConexión eléctrica
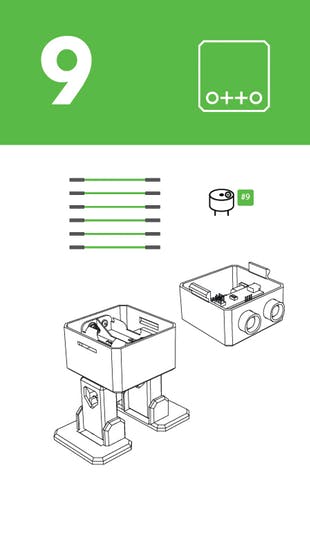
- Prepare los cables DuPont, el micro interruptor y el zumbador.
- Luego siga los números de los pines del diagrama y asegúrese de colocarlos en la posición correcta. Si no tiene el shield de Arduino Nano, use un protoboard y siga este diagrama de circuitos de Autodesk.
- Finalmente, teniendo cuidado con los cables, debe ensamblar la cabeza al cuerpo utilizando los encastres laterales.
Instalación del Código
Para instalar el código necesitará una computadora.
- Descargue e instale el software de Arduino.
- Copie las librerías del Oscillator en C:Users\user\Documents\Arduino\libraries (o donde esté instalada la carpeta de su biblioteca):
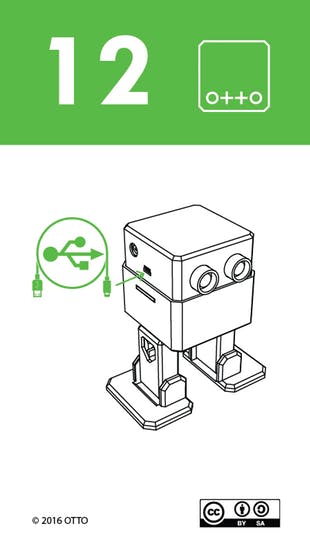
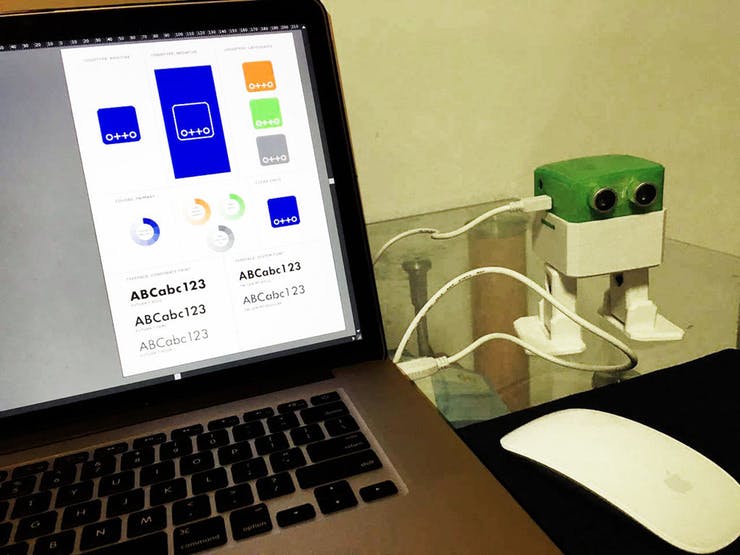
- Conecte su Otto a un puerto USB de su computadora.
- Finalmente, abra y cargue el código OTTO_smooth_criminal.ino en su Arduino Nano.
- Su Otto esta listo para bailar!
Siempre puedes probar diferentes códigos de la Wikifactory de Otto.


















